Robot mirroring: A framework for self-tracking feedback through empathy with an artificial agent representing the self
Abstract
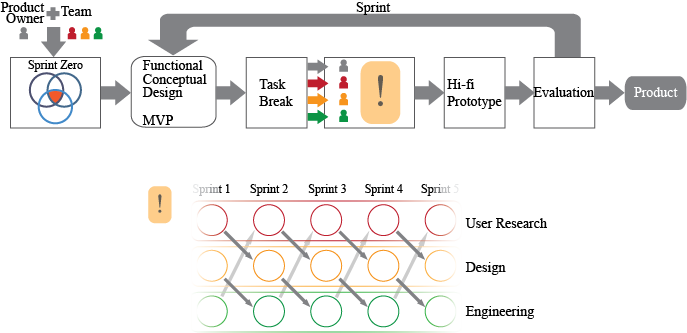
Current technologies have enabled us to track and quantify our physical state and behavior. Self-tracking aims to achieve increased awareness to decrease undesired behaviors and lead to a healthier lifestyle. However, inappropriately communicated self-tracking results might cause the opposite effect. In this work, we propose a subtle self-tracking feedback by mirroring the self’s state into an artificial agent. By eliciting empathy towards the artificial agent and fostering helping behaviors, users would help themselves as well. Finally, we reflected on the implications of this design framework, and the methodology to design and implement it. A series of interviews to expert designers pointed out to the importance of having multidisciplinary teams working in parallel. Moreover, an agile methodology with a sprint zero for the initial design, and shifted user research, design, and implementation sprints were proposed. Similar systems with data flow and hardware dependencies would also benefit from the proposed agile design process.
Monica Perusquía-Hernández
Affective Computing Scientist, Concept, UX/IU designer
My research interests include HCI, Affective Computing, Artificial Intelligence and Biosignal Processing.
Marisabel Cuberos Balda
Visual Interaction Designer
My main goal is to increase scientific knowledge and findings to other professionals and the general public, through assistance to other researchers in visual communication and graphical support.
David Antonio Gómez Jáuregui
Affective Computing Scientist, Stress specialist
My research interests are focused on creating new ways of natural user interaction with computers by detecting emotions, gestural and non-verbal behaviours from users.
Diego Paez-Granados
Robotics Engineer, Human-Robot Interaction
I work on soft robotics designs and control methods for assisting people with mobility impairments in posture transitions and locomotion, based on soft and compliance principles for robot design and control.